La construcció del submarí consta de diferents parts:
- xassís: l’esquelet del submarí, vam haver de posar-hi els motors amb brides, i perquè la placa anés connectada amb l’estructura, vam utilitzar una regleta, on hi havien tots els cables necessaris perquè els motors estiguessin connectats a la placa, posteriorment vam enganxar la regleta a l’estructura. Els motors van haver d’ésser aïllats per a que es poguessin submergir. Per aïllar-los, vam introduir en un tub el motor protegit per cinta aïllant i vaselina i, posteriorment, vam afegir-hi les hèlix amb una mica de cola per a tal que es subjectin al motor.
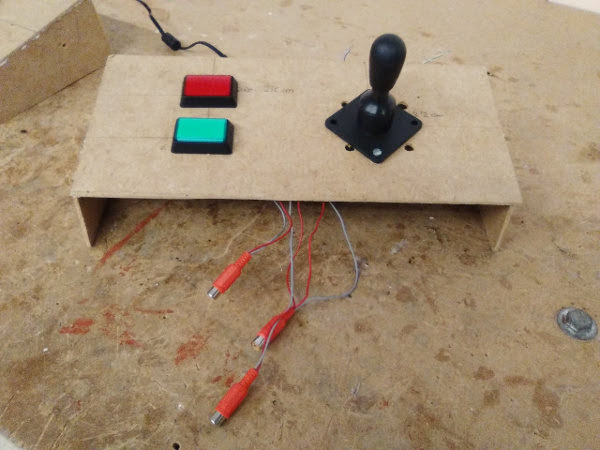
- control amb consola elèctrica: inicialment, es proposa que el submarí es controli amb una consola elèctrica. Per comandar el ROV es farà mitjançant un joystick (que permetrà anar endavant, enrera, dreta i esquerra) i dos pulsadors (pujar i baixar)
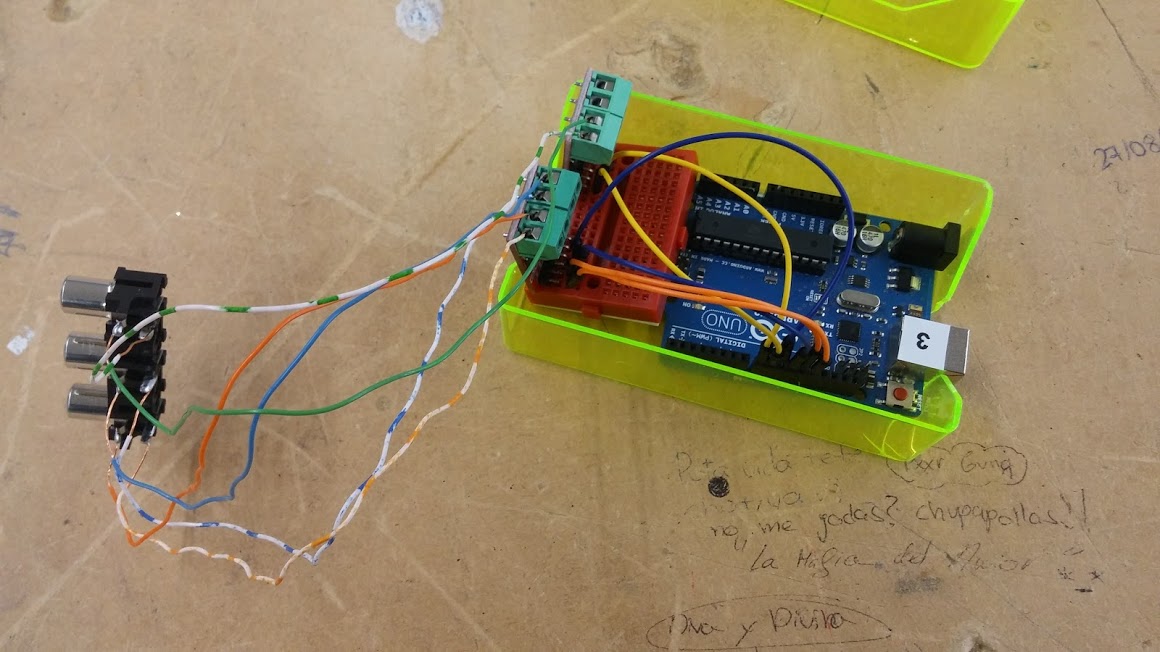
- control amb Arduino: per tal de millorar el projecte, hi hem afegit una placa Arduino que permetrà el control a través del mòbil. La Placa Arduino és una placa de circuit imprès simple basada en el micro-controlador de codi obert procedent de la plataforma Wiring, amb l’objectiu de fer més simple i accessible el disseny de circuits electrònics amb micro-controladors. Amb l’ajuda del nostre professor, vam aprendre a llegir i a conèixer les utilitats de la placa i saber comunicar-nos amb ella. Tot seguit, vam procedir a elaborar la programació sabent on connectaríem els motors a la Placa Arduino, ja que precisàvem d’aquesta informació des de l’inici de la programació.
- programació d’una App de control per Android: mitjançant la plataforma MIT App Inventor 2, la qual ens va anar de luxe degut a la gran visualitat d’aquesta. Cada integrant del grup va haver de dissenyar la seva pròpia aplicació, aconseguint així que cadascun de nosaltres pogués fer-la a gust i imatge.
- proves de funcionament: un cop realitzat tot el treball, vam fer proves de flotabilitat del submarí i de funcionament de l’app