La sessió anterior va estar dedicada a la contrucció del robot explorador Milo i a dotar-lo de moviment. Però tot robot explorador necessita de sensors i artiugis d’obtenció d’informació exterior que facin realment profit a la recerca de dades.
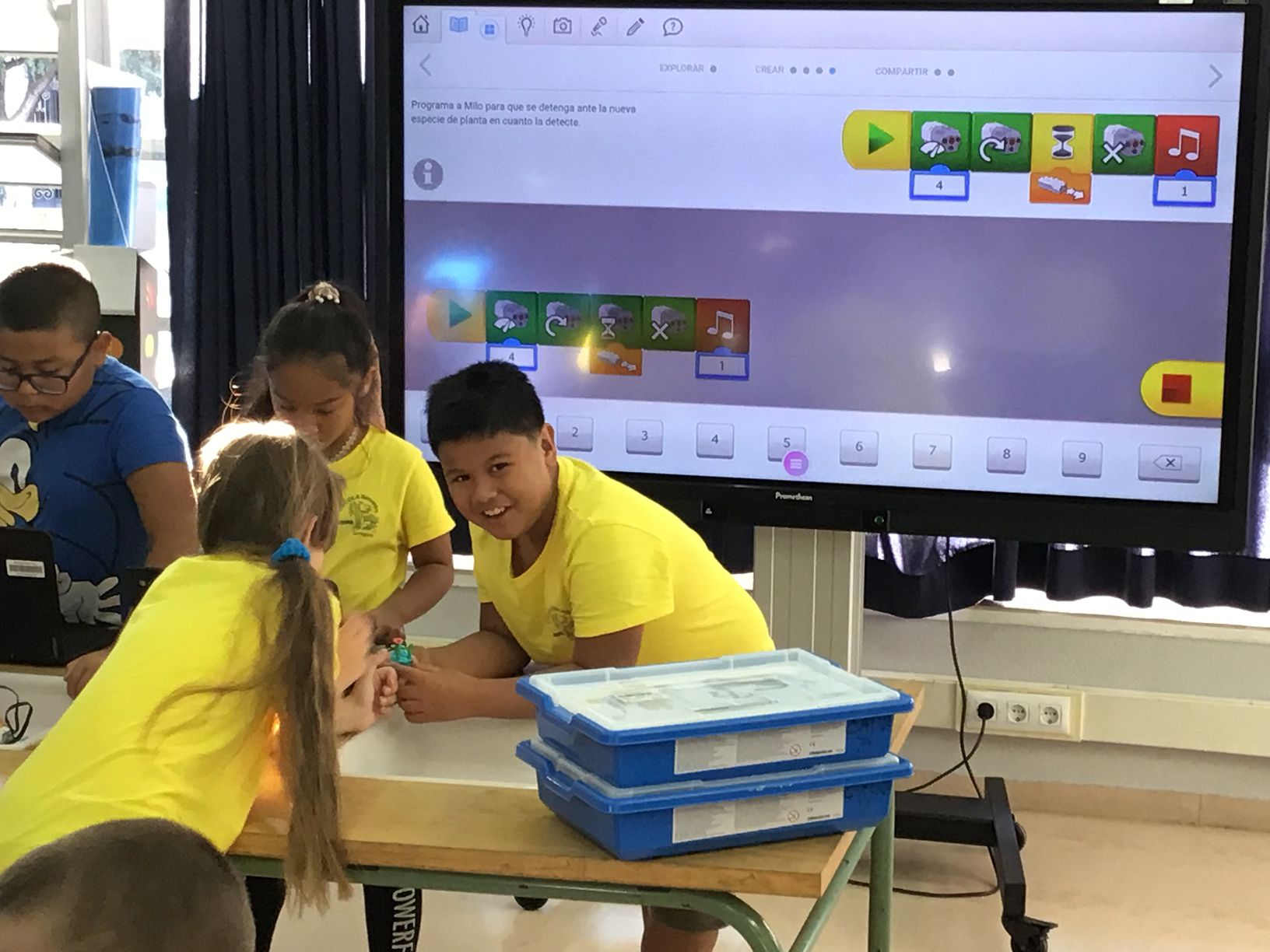
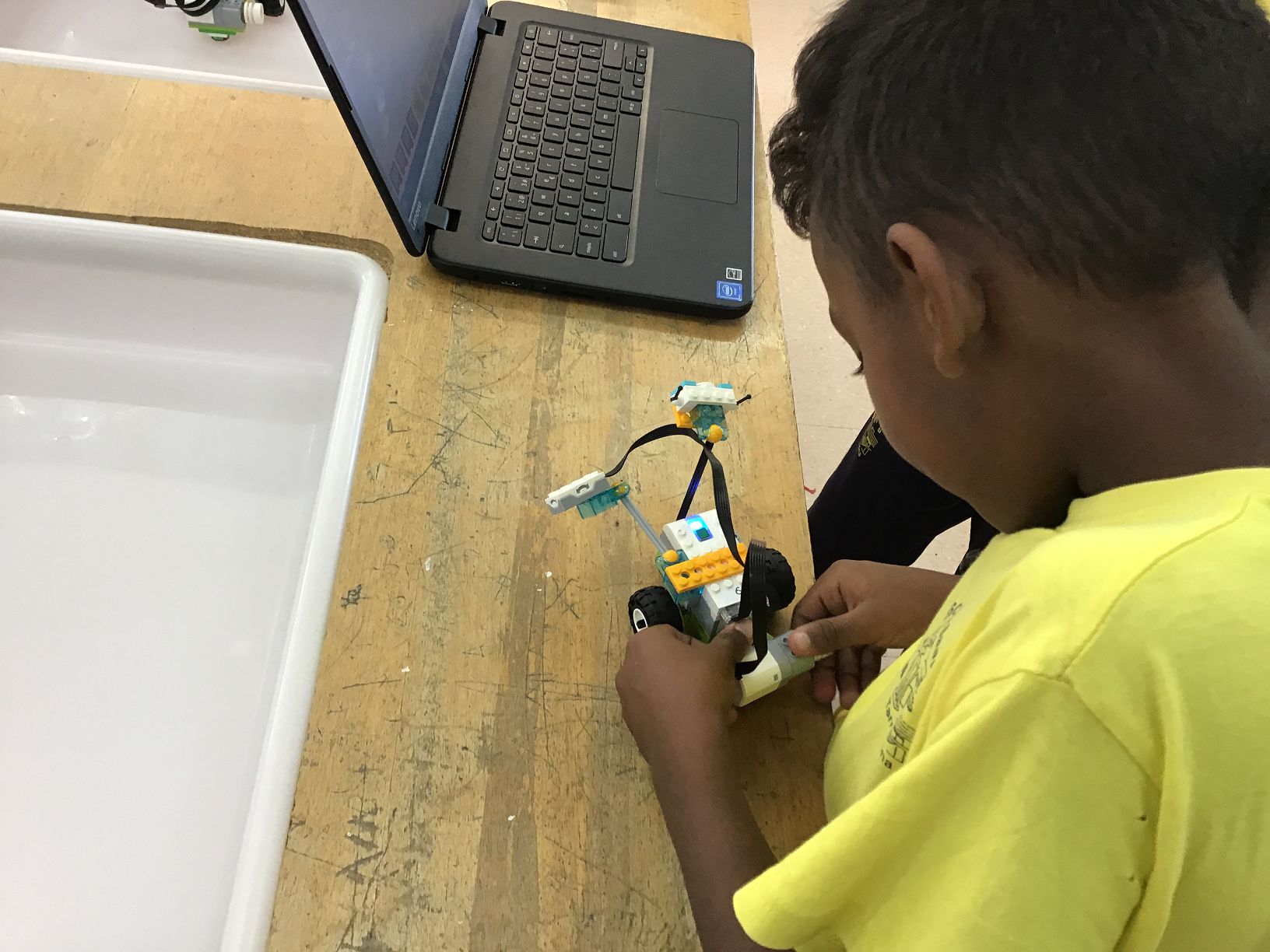
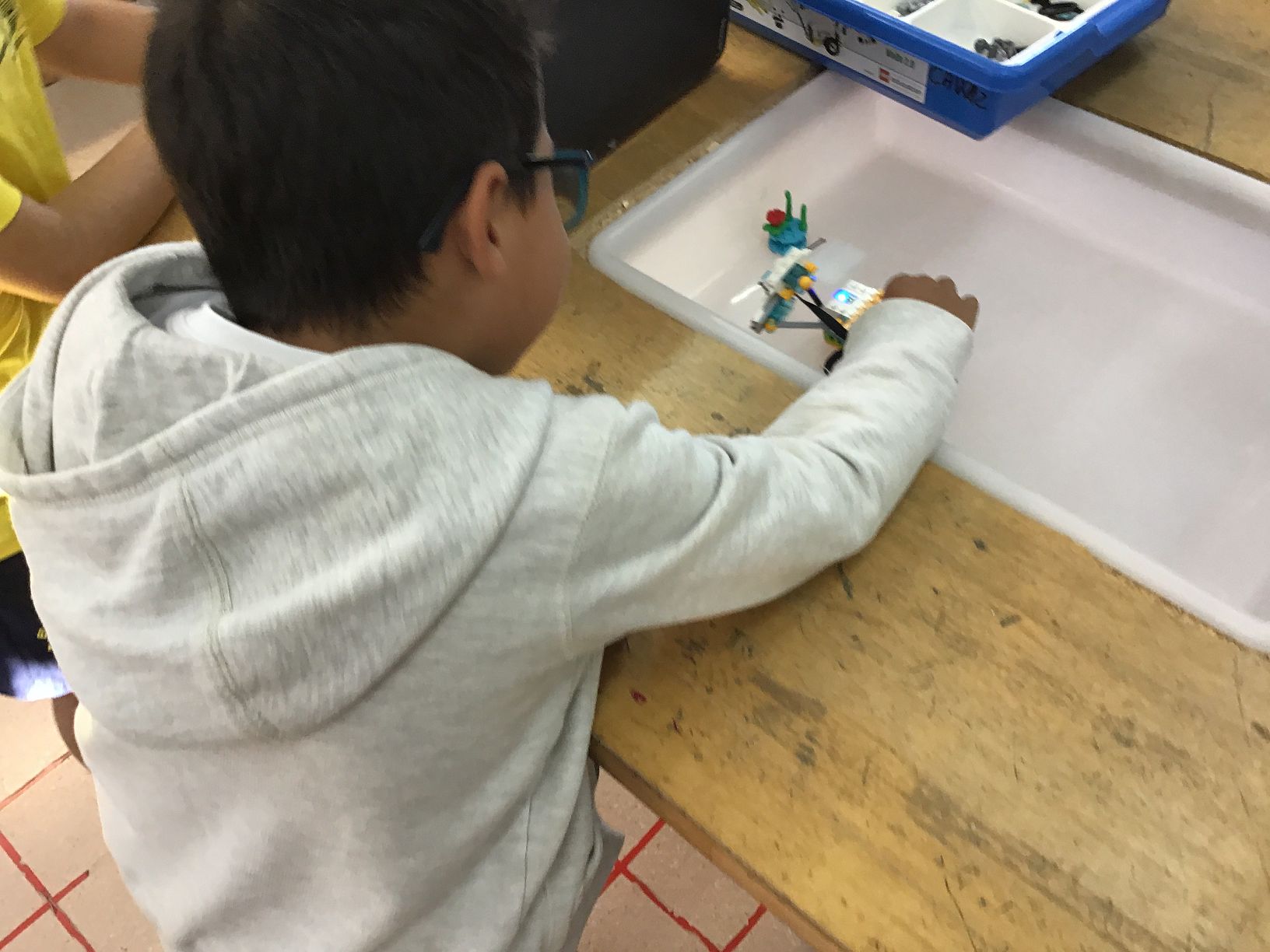
Això justament és el que hem fet avui, dotar el robot explorador d’un sensor de distància que és capaç de detectar objectes i irregularitats al terreny.
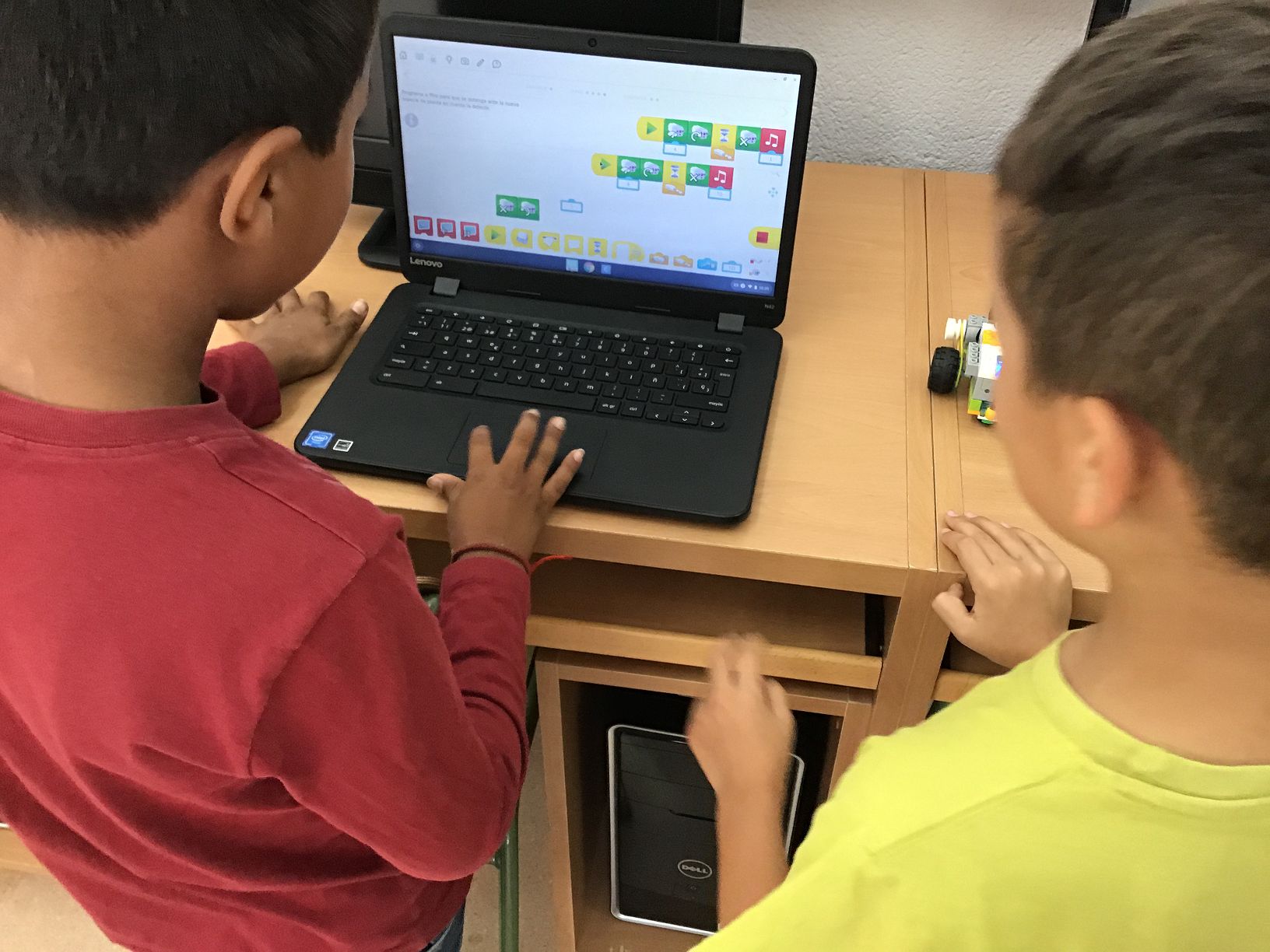
Potser és millor que us ho expliquin aquests alumnes, no?