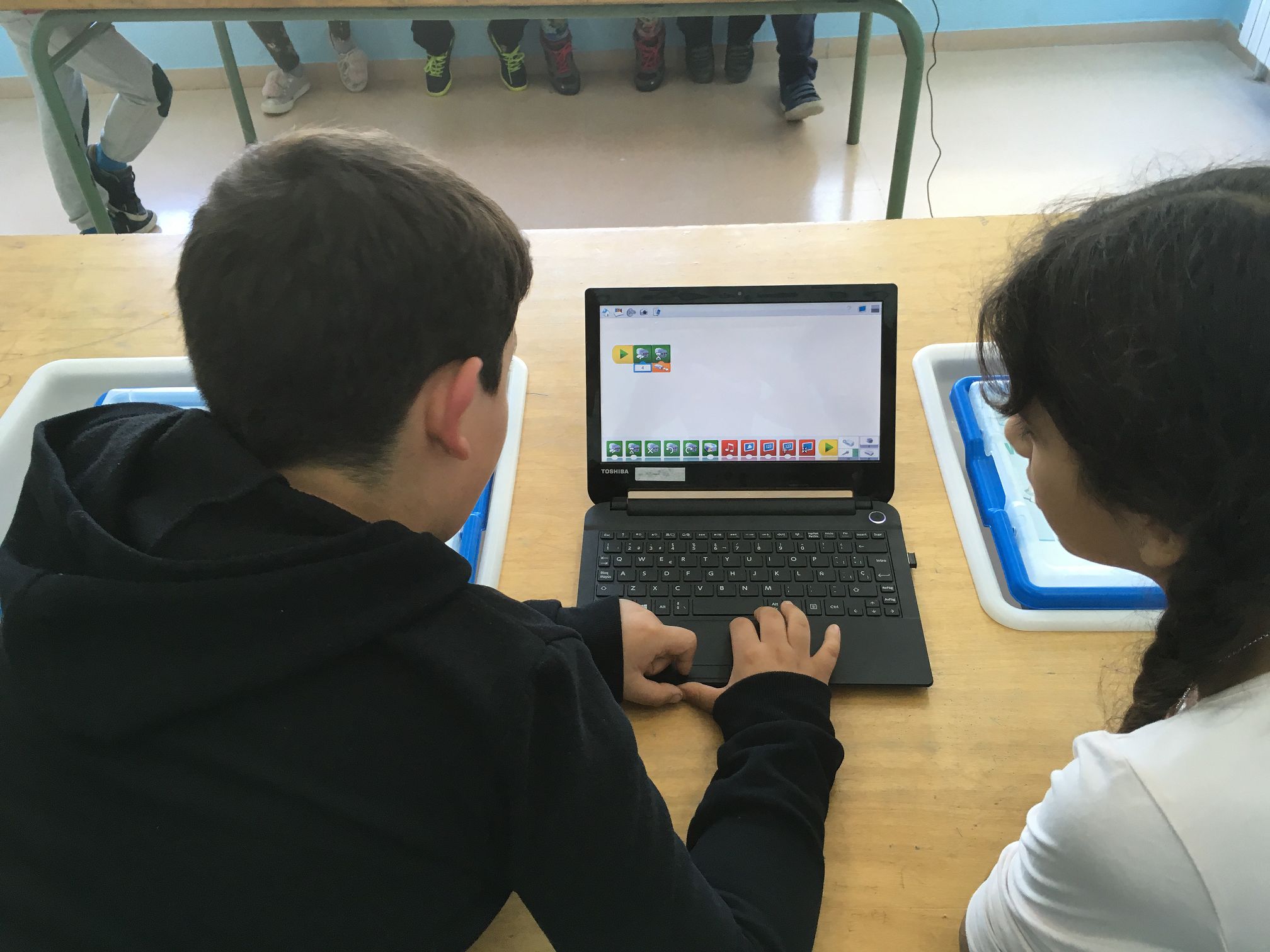
Aquesta setmana, els alumnes de 4t han programat el Milo per a que avanci indefinidament fins que trobi el final de la taula i s’aturi. Aquesta vegada hem utilitzat el sensor de disància d’aquest robot per calcular quan la distància entre el sensor es fa més gran, fet inequívoc de que ha arribat al final de la taula. Així aconsegueix aturar-se.
Si mireu les fotografies podreu veure la seqüència que hem programat per a tal fi.