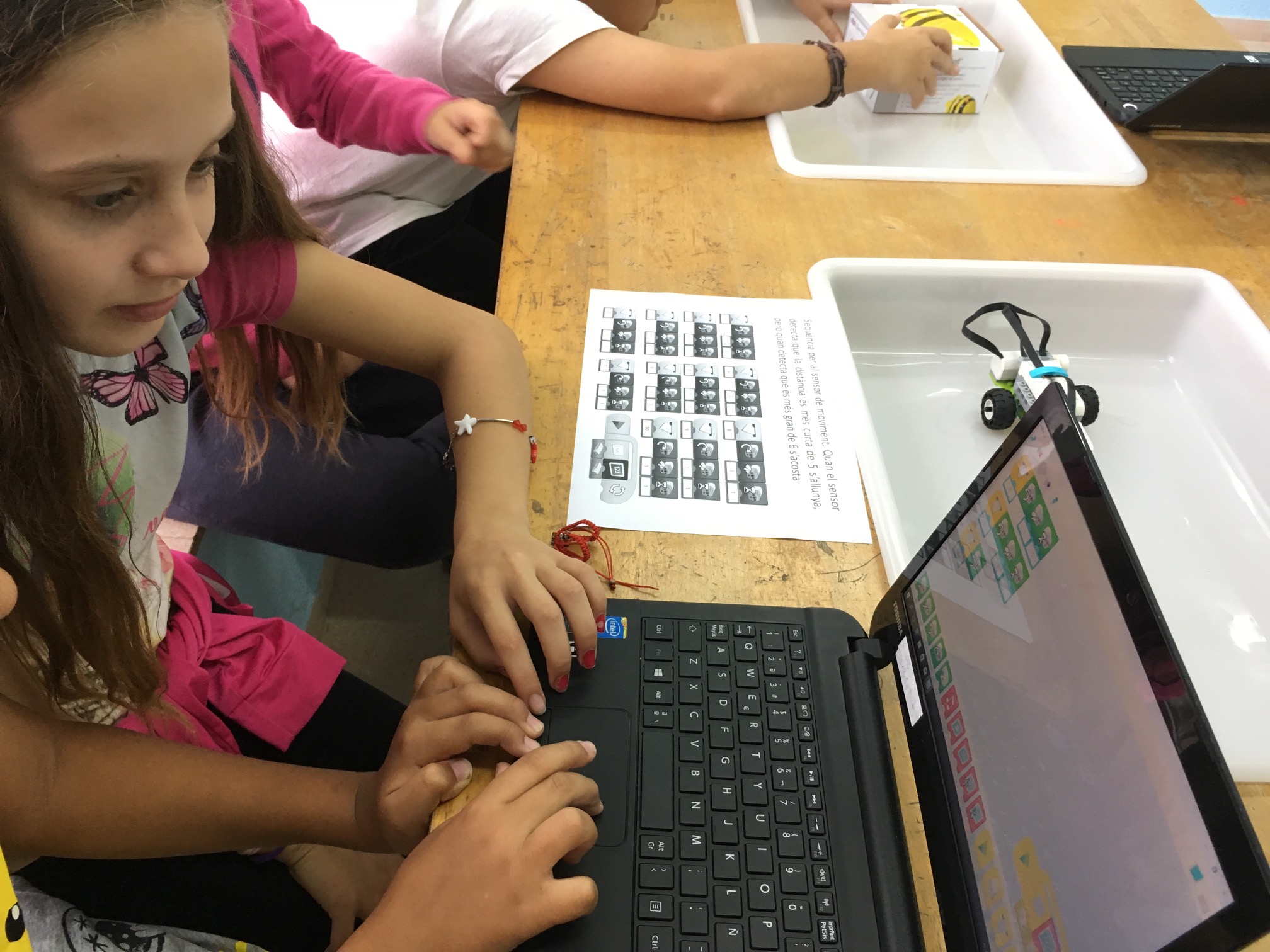
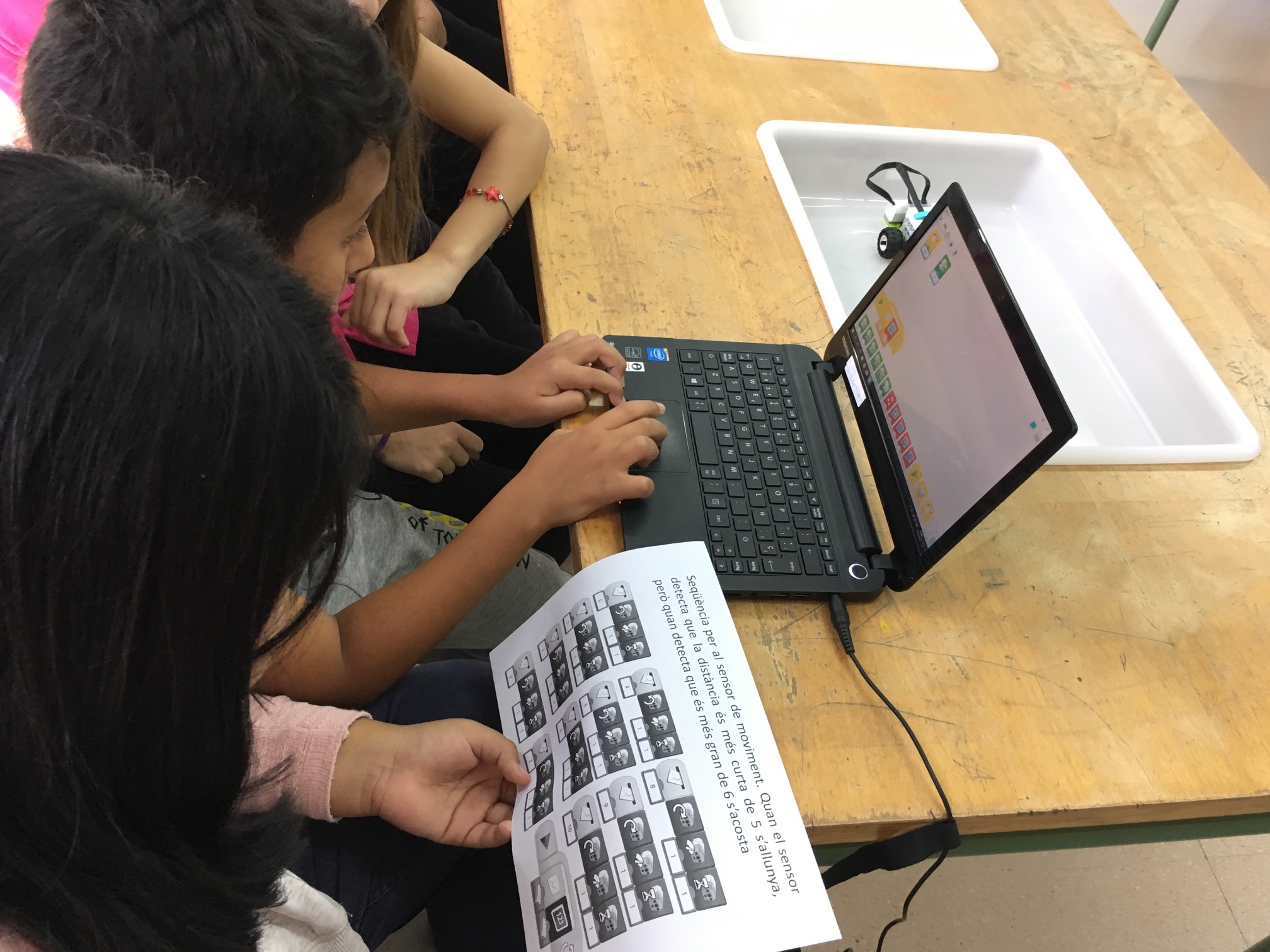
Hem creat un programa que, a través del sensor de distància, calcula l’espai que hi ha entre el robot i la paret. El robot utilitza aquesta informació pe mantenir-se a la mateixa distància de la paret. Si la paret s’acosta, el robot s’allunya, però si la paret s’allunya, el robot s’hi acosta.