Castanyada 2017

La Castanyada ha arribat a l’escola Saavedra amb força.

Avui hem fet que en Milo pogués girar 360 graus sobre si mateix. Hem hagut de fer unes petites modificacions a l’estructura del robot per a que això fós possible. Hem programat la seqüència amb Scratch
En Milo gira 360 graus 5è Llegeix més »
Avui hem fet una fotografia en 360 graus a l’aula de robòtica amb els alumnes de 1r del grup del Sol. Us deixem el resultat de com ha quedat. Per poder veure-ho des d’un dispositiu mòbil feu clic aquí
Robòtica amb bee-bots en 360 graus (1r Sol) Llegeix més »
Avui hem fet una fotografia en 360 graus a l’aula de robòtica amb els alumnes de 1r del grup de la Lluna. Us deixem el resultat de com ha quedat. Per poder veure-ho des d’un dispositiu mòbil feu clic aquí
Robòtica amb bee-bots en 360 graus (1r Lluna) Llegeix més »

Feu clic per veure totes les imatges
A primària fem panellets Llegeix més »

Com cada divendres, en el marc dels Tallers a educació infantil, un grup d’alumnes de cada nivell hem fet activitats amb els bee-bots.
Taller de robòtica a infantil amb Bee-bots Llegeix més »
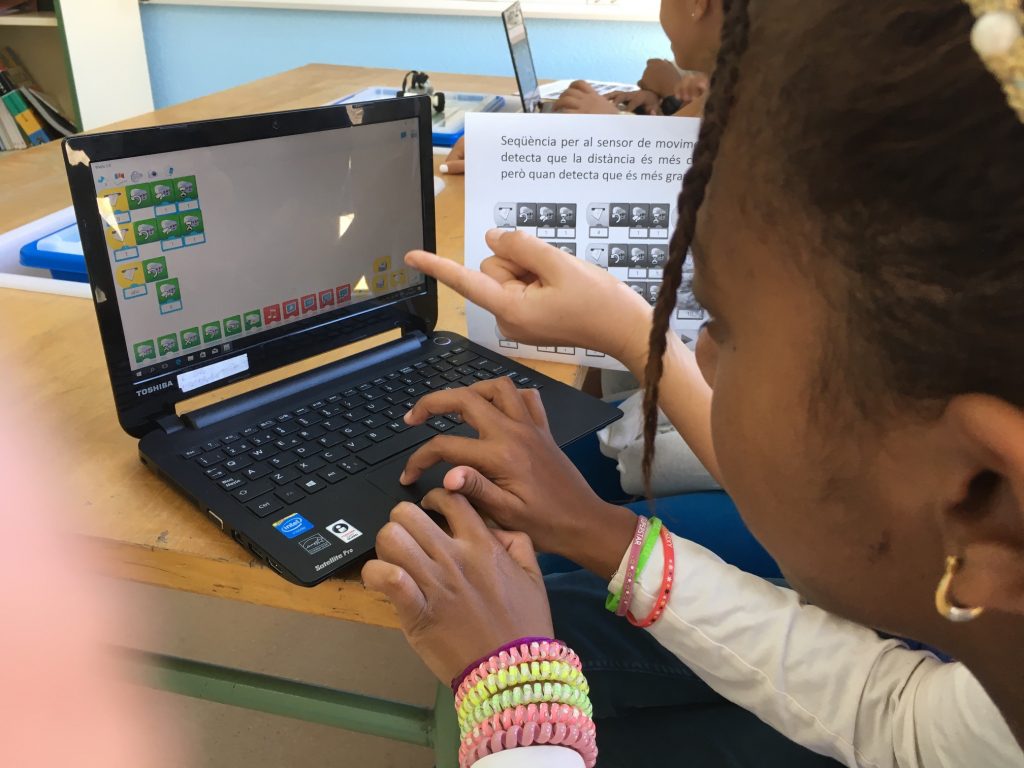
Hem creat un programa que, a través del sensor de distància, calcula l’espai que hi ha entre el robot i la paret. El robot utilitza aquesta informació pe mantenir-se a la mateixa distància de la paret. Si la paret s’acosta, el robot s’allunya, però si la paret s’allunya, el robot s’hi acosta.
Sensor de moviment per mantenir la distància 6è Llegeix més »

Aquesta setmana hem començat a treballar el tennis a les sessions d’educació física. Una activitat motivadora, apta per a tothom i que demana cert nivell de destresa amb la raqueta.
Activitat de tennis Llegeix més »

Per primer any, el curs 2017-2018 l’Escola Saavedra ha presentat projectes a la European Code Week 2017, que tot i tenir l’epicentre fort de les activitats entre els dies 7 i 22 d’octubre, les activitats que engloben es distribueixen al llarg de tot l’any escolar. El principi fonamental d’aquest programa és l’aprenentatge del llenguatge de
Activitats de l’escola a la CodeWeekEU 2017 Llegeix més »

Una de les habilitats que té en Milo és la de calcular distàncies i detectar objectes que té a la vora. Avui hem treballat amb aquesta habilitat, primer fent que el robot s’aturi i faci música quan troba un objecte i després afegint-hi la possibilitat que esperi a la nostra senyal manual per iniciar la
Milo, el robot amb sensor de distància Llegeix més »