Milo, el robot espacial que loclitza objectes 4t
El treball d’aquesta sessió de robòtica a 3r ha consistit en… bé, millor que us ho expliquin els nens mateixos
Milo, el robot espacial que loclitza objectes 4t Llegeix més »
El treball d’aquesta sessió de robòtica a 3r ha consistit en… bé, millor que us ho expliquin els nens mateixos
Milo, el robot espacial que loclitza objectes 4t Llegeix més »
El treball d’aquesta sessió de robòtica a 3r ha consistit en… bé, millor que us ho expliquin els nens mateixos
Milo, el robot espacial que localitza objectes Llegeix més »

Els alumnes de 2n hem fet un treballa de bee-bots al voltant de la Castanyada. Amb dos tapissos, un en relació a la cançó de la Castanyera i l’altre amb els elements típics d’aquesta festa. Així hem après vocabulari com castanya, panellet, moniato, patata al caliu, bidó, paella castanyera, paperina, …
Els Bee-bots i la castanyada 2n Llegeix més »

Els alumnes de 1r hem fet un treballa de bee-bots al voltant de la Castanyada. Amb dos tapissos, un en relació a la cançó de la Castanyera i l’altre amb els elements típics d’aquesta festa. Així hem après vocabulari com castanya, panellet, moniato, patata al caliu, bidó, paella castanyera, paperina, …
Castanyada amb bee-bots 1r Llegeix més »
Avui, 16 d’octubre, es celebra el “Dia Euopeu de la Ressucitació” i per aquest motiu els alumnes de l’escola hem volgut fer aquest mosaic al pati formant un cor i el número 112, el telèfon que hem de marcar si ens trobem en una situació on algú pateix una aturada cardíaca. Us emplacem a recordar-lo i
European restart a heart day Llegeix més »

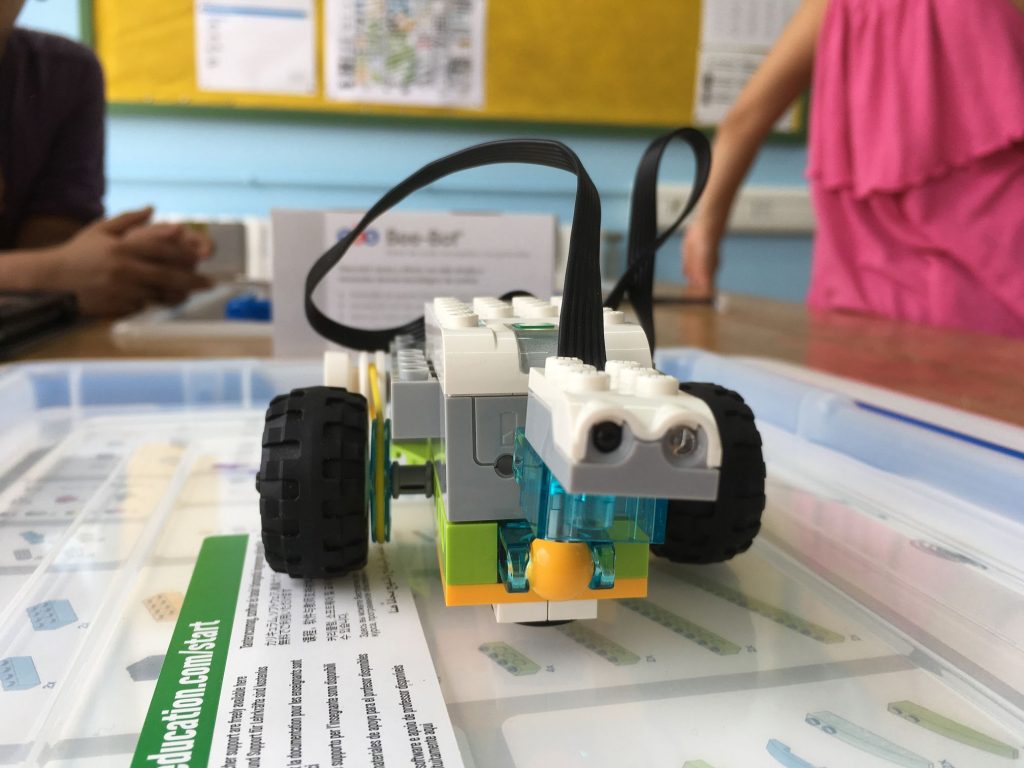
Milo és un robot científic que ens ajudarà contruir el pensament computacional i descobrir com la tecnologia ens ajuda a la nostra vida. Avui l’hem fet néixer i l’hem ensenyat a caminar. És el començament d’una història d’aprenentatges compartirts del que tots en sortirem beneficiats.
Creem en Milo a 5è Llegeix més »
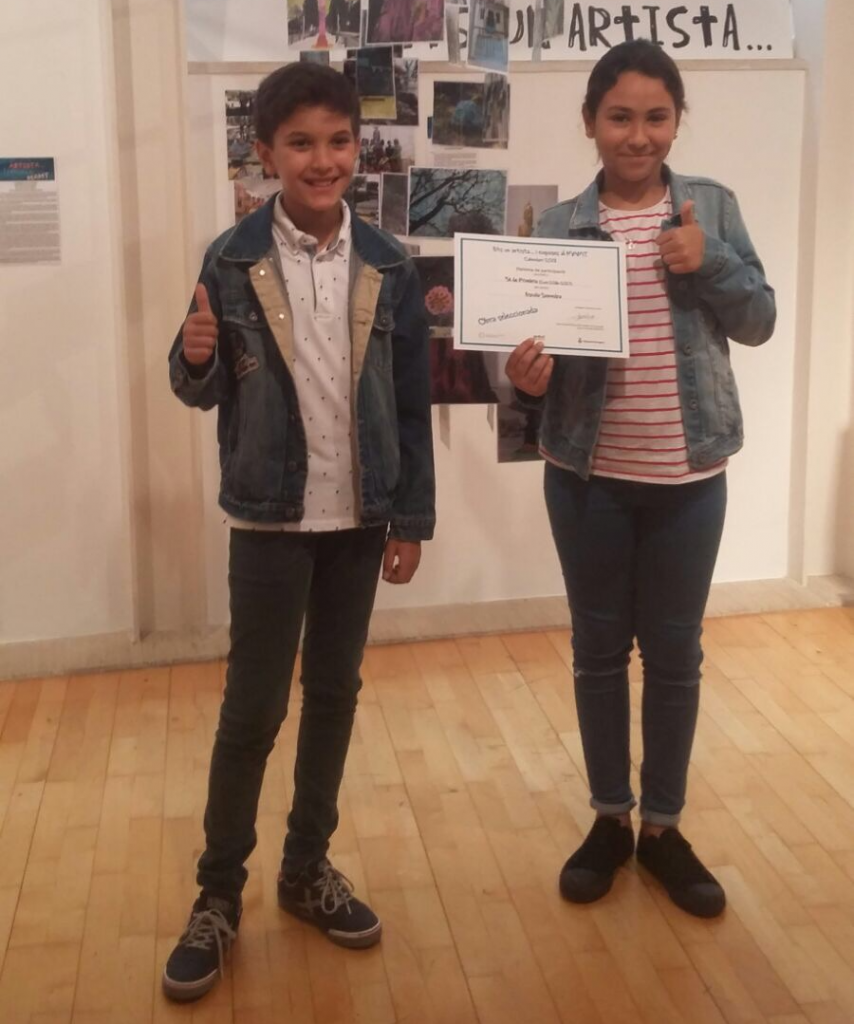
L’Escola ha estat seleccionada al concurs “Ets un artista… i exposes al MAMT” per il.lustrar el mes de febrer del Calendari 2018 amb l’obra “Bocins de colors al voltant de l’escola” de la classe de 5è de primària del curs passat i avui dissabte hem anat a recollir el premi. Us convidem a visitar el
Ets un artista i exposes al MAMT Llegeix més »

En Milo és un robot científic construït amb bricks de Lego que ofereix mil possibilitats de joc, diversió i sobretot, aprenentatge. Com totes les joguines Lego, un cop obres la caixa et trobes un nombre incomptable de peces, tots necessàries i imprescindibles per arribar a construir. Això és el que hem fet aquesta setmana a
Donem vida al robot científic! 3r Llegeix més »

En Milo, el robot científic, ofereix la possibilitat d’implantar-li un sensor de moviment, semblant a les cèl·lules fotoelèctriques que aturen les portes dels parquings quan s’estan tancant i un vehicle o una persona passa per sota. Amb aquesta mateixa tecnologia hem fet que en Milo esperi a que alguna cosa activi el seu sensor per
Milo, el robot amb sensor de distància 6è Llegeix més »

Avui hem après a fer funcionar el sensor de moviment del robot Milo. L’hem implementat en la seva estructura i n’hem investigat les possibilitats. Finalment hem creat una seqüència de programació que, a banda d’aturar-se en trobar la flor, es mantingués estàtic fins que li donessim l’ordre de posar-se en marxa passant la mà per
El sensor de moviment d’en Milo 4t Llegeix més »