Es tracta de comptar les rpm d’un motor cc fent servir la plataforma Arduino Per aconseguir-ho hem utilitzat el sensor CNY70, que es un sensor infraroig.
Connexions de l’arduino
Materials
1. Sensor cny70: El CNY70 és un sensor d’infrarojos de curt abast basat en un emissor de llum i un receptor , ambdós apuntant en la mateixa direcció , i el funcionament es basa en la capacitat de reflexió de l’objecte, i la detecció del raig reflectit pel receptor .
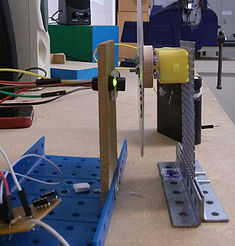
2. Motor CC
3 CD blanc
4. Arduino UNO
5. Resistències de 400 i 10k ohms
6. Cables
7. LED i font d’alimentació
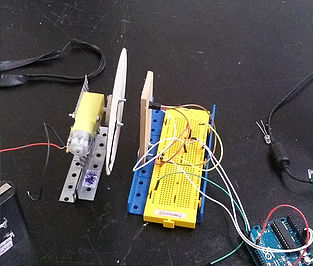
Muntatge:
Primer hem de connectar el CNY70 amb l’arduino, a més hi ha que afegir les reistències de 400 i 10k ohms.
Desprès de muntar tot això hi ha que cargar el progrma a l’arduino. Anteriorment, hem de tenir muntat el motor amb el CD blanc, i totes les connexions ben connectades per evitar errors.
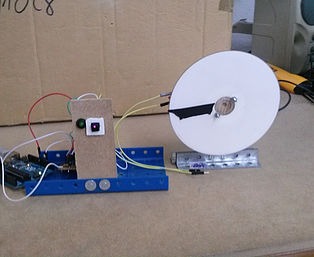
Funcionament del programa
El programa funciona amb un sensor cny70 que està programat per rebre la senyal de la cinta negra que està enganxada al CD.
Cada cop que pasi per davant del cny70 el LED verd s’encendrà.
I per comptar les rpm vam fer el següent:
En un temps de 15 segons l’arduino comptava les vegades que comptava les vegades que el sensor llegia la cinta negra.
Desprès de comptar-les aquest temps el multipicavem pels valor continguts en el Serial de l’arduino:
rpm= 60·counter/15= 6·counter
Codi arduino d’aquest comptador
Et pots baixar el codi des d’aquesta pàgina de GitHub