Los ultrasonidos son una serie de ondas cuya frecuencia está por encima de la capacidad de audición del oído humano. El ultrasonido no tiene propiedades diferentes de las ondas audibles, excepto que los humanos no pueden oírlas. El límite auditivo varía dependiendo de la persona y es aproximadamente de unos 20 kHz en jóvenes de menos de 18 años. Por encima de esta frecuencia el oido humano no puede captar ningun sonido.
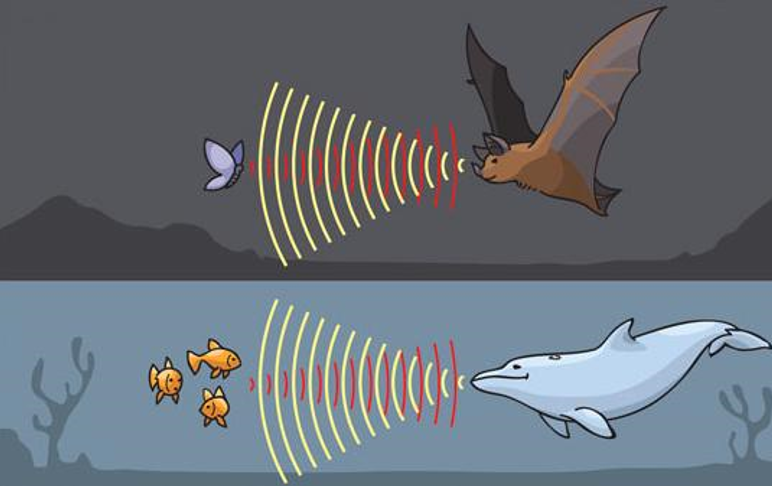
El sensor de ultrasonidos basa su funcionamiento en el mismo principio que usan algunos animales como los murciélagos o los delfines.
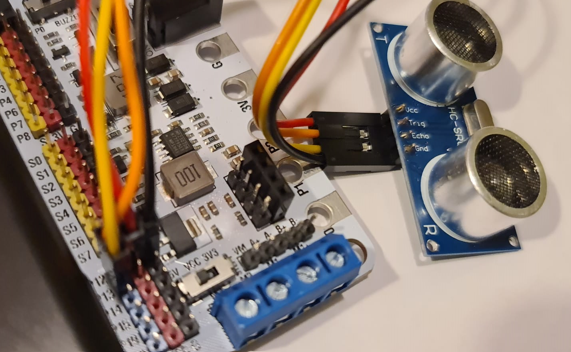
Sensor ultrasonido HC-SR04
El sensor HC-SR04 emite un sonido y cronometra el tiempo (t) que tarda en recibir el eco del sonido emitido.
 |
 |
Tipo de conexió. (4 pines)
VCC –> 5 VCC |
El proceso de medida del tiempo se desencadena entregando la orden de hacer un ping por el pin Trig y recibiendo el resultado por el pin Echo.
Conexionado físico
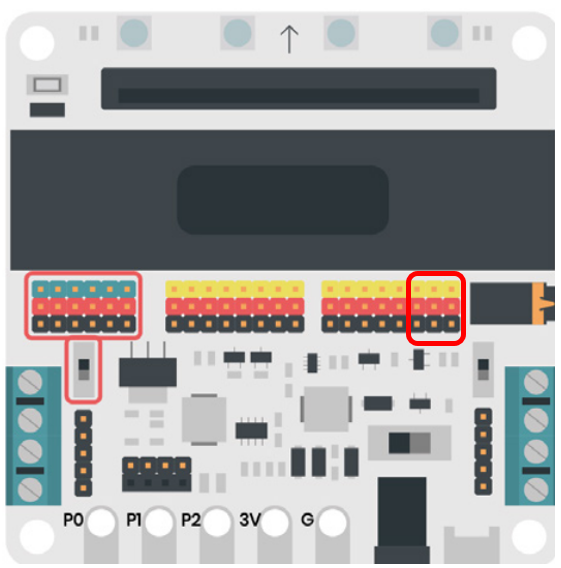 |
El sensor HC-SR04 requiere un voltaje de 5VCC.
Los 5VCC se pueden obtener en los pines GVS 3,3 V-5 V (P12, P13, P14, P15, P19 i P20) pero requieren que el interruptor [5V VCC 3V3] esté en la posición 5V
Cuando trabajemos con el sensor de ultrasonidos en la placa micro:shield debe estar activa la pila / bateria: Interruptor DC en ON. |
Makecode
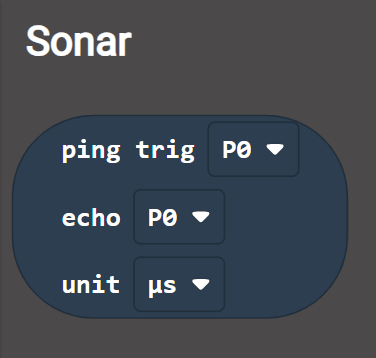
La extensión del makecode SONAR proporciona todo el software para gestionar el entorno de los ultrasonidos.
Un solo bloque de código es suficiente para enlazar el sensor HC-SR04 con la placa procesadora micro:bit
 |
 |
Ejemplo de programación:
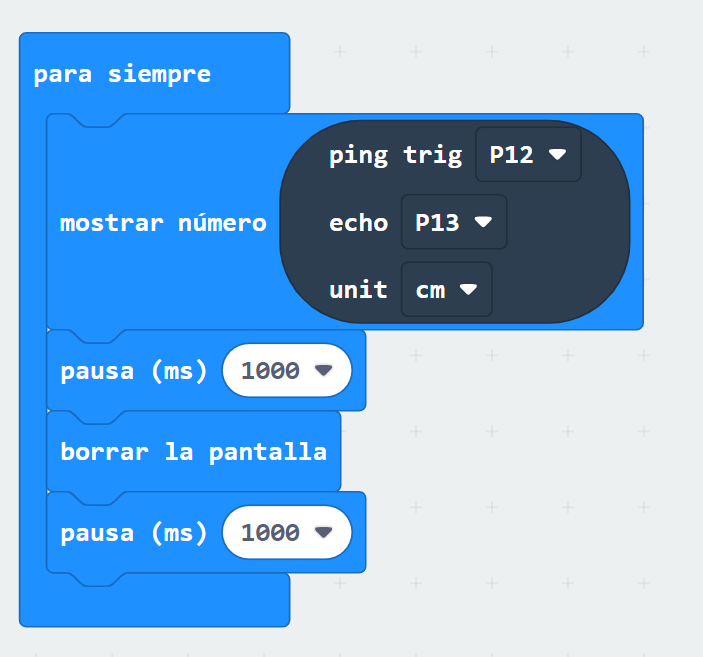
Atención: En la placa micro;shield ebotics debe de estar el interruptor DC de la pila / bateria en ON. Sin este refuerzo energético no funciona el ejercicio.
Atención: Este bloque presenta un “bug“. Si no hay ningún objeto delante del sensor, o estan más allà de los tres metros, el sensor no puede determinar la distancia y retorna un “0”.
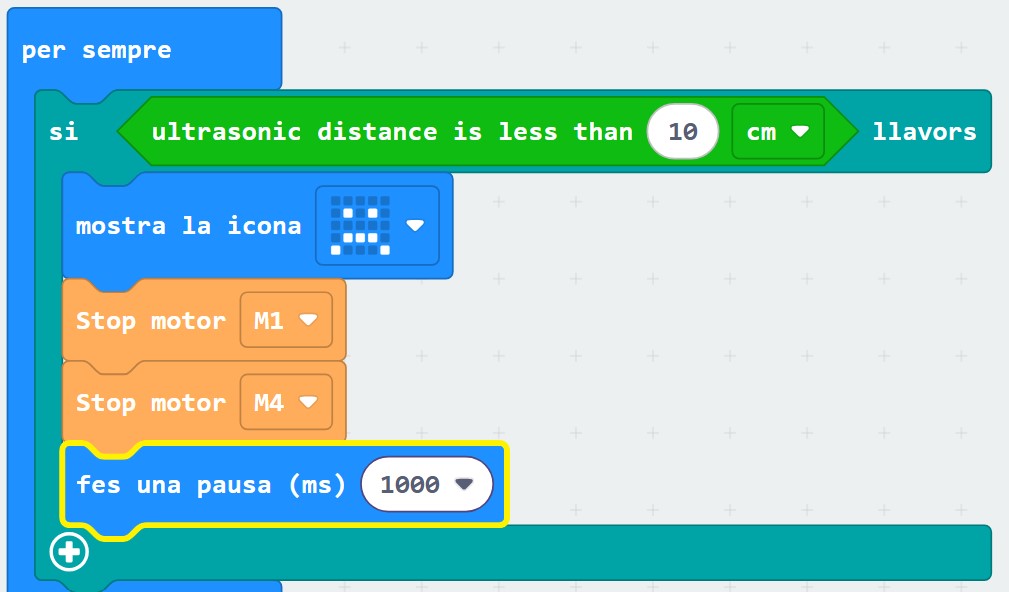
Posible “by-pass”:
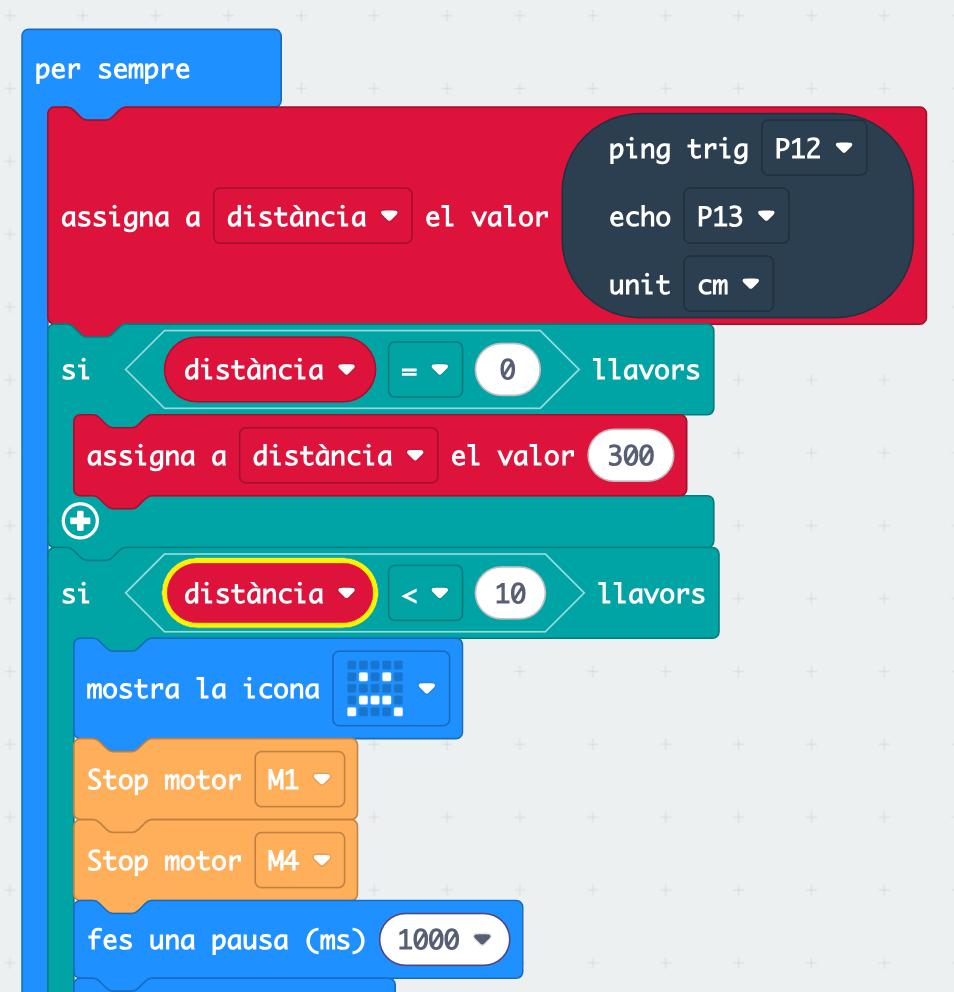
No obstante, de cara a los alumnos, los profesores han considerado mejor utilizar otra extensión la “makerbit”, su función es que cuando los objetos estan a una distancia de 300 cm o más, retorna el valor 300.
 |
 |