













Pla de treball
- La placa del kit de robòtica
- Els components que es poden connectar a la placa
- Els blocs específics de programació de l’Scratch for Arduino.
Comencem …
Ara que comenceu a conèixer la placa us trobareu amb noms complicats dels seus components. Per això, al llarg de la sessió us anirem explicant el significat de cadascun i per a què serveixen, així us aneu familiaritzant amb els termes. Els noms dels components els trobareu recollits a Com que som programadors i programadores parlem de … Així, cada vegada que tingueu un dubte podeu donar-li una ullada.
Aquesta sessió serà un petit manual de funcionament i programació de la placa que podreu consultar quan tingueu dubtes a la resta de sessions. Amb aquesta informació estareu preparats per pensar i donar solucions a les vostres propostes.
I de cervell … la placa i la programació amb Scratch for Arduino
Amb la placa podeu aprendre a crear ginys segons el vostre interès… és el cervell d’aquests ginys. La robòtica és una forma divertida de connectar l’electrònica amb la programació i el treball en grup.
La placa que hem fet servir nosaltres és la bq Zum Core de la bq Zum Box, però qualsevol altre kit de robòtica amb una placa compatible amb Arduino us serviria.
La placa rep l’alimentació (el corrent elèctric) del portapiles o bé quan es connecta a un ordinador (pel connector USB). Aquesta serà la nostra opció quan la programem i la fem funcionar amb Scratch for Arduino (S4A).
Els components es connecten a la placa mitjançant una tira de 3 cables (vermell, negre i blanc).
Per tal de no malmetre la placa, us recomanem que poseu l’interruptor de la placa en posició OFF quan connecteu o desconnecteu components.
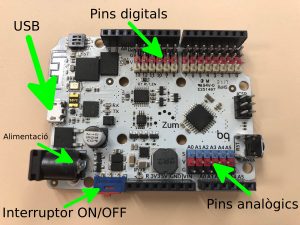
En la foto següent podeu veure on fer les connexions :
- Connector d’alimentació
- Pins digitals : podeu connectar-hi LEDs, polsadors …
- Pins analògics : podeu connectar-hi sensors, potenciòmetres …
- Connector USB
- Interruptor ON/OFF
Amb la placa i S4A podeu treballar amb variables analògiques i digitals :
- Les variables analògiques corresponen a magnituds que poden tenir qualsevol valor dins d’un marge de valors determinat. Per exemple, el sensor de llum mesura valors entre 0 i 255 en funció de la quantitat de llum que rep
- Les variables digitals corresponen a estats que només poden tenir 2 valors (0 o 1). Per exemple, un LED pot estar encès (1) o apagat (0) i un botó pot estar premut (1) o no (0)
En tots dos casos, els pins de la placa poden ser d’entrada o de sortida :
- En els pins d’entrada podeu connectar components que aporten informació a la placa, com ara sensors, botons o potenciòmetres
- Els pins de sortida són els que controlen els components de sortida, com ara LEDs, brunzidors o motors
En la taula que hi ha a continuació teniu el detall dels pins de la placa que podeu utilitzar amb S4A. Teniu indicats els pins que farà servir cada component de la caixa forta :
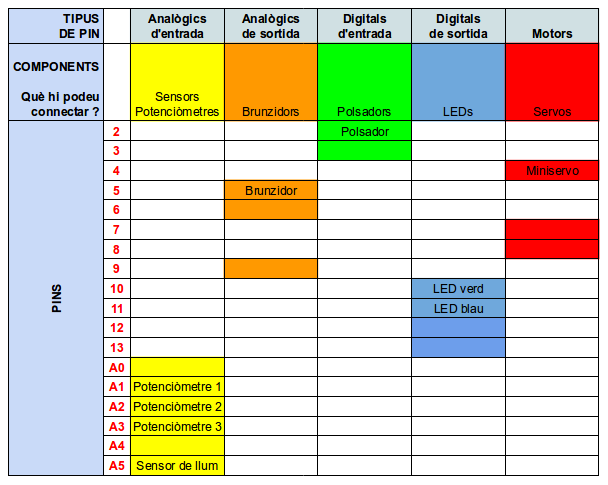
No us poseu nerviosos, més endavant us explicarem quins pins necessiteu en cada cas.
La programació amb Scratch for Arduino (S4A)
En aquest mòdul fareu servir una versió modificada de Scratch desenvolupada en el Citilab. S4A inclou blocs específics que permeten programar plaques compatibles amb Arduino.
![]() Fem-ho pas a pas
Fem-ho pas a pas
- Connecteu la placa a l’ordinador mitjançant el cable USB i poseu en marxa S4A :
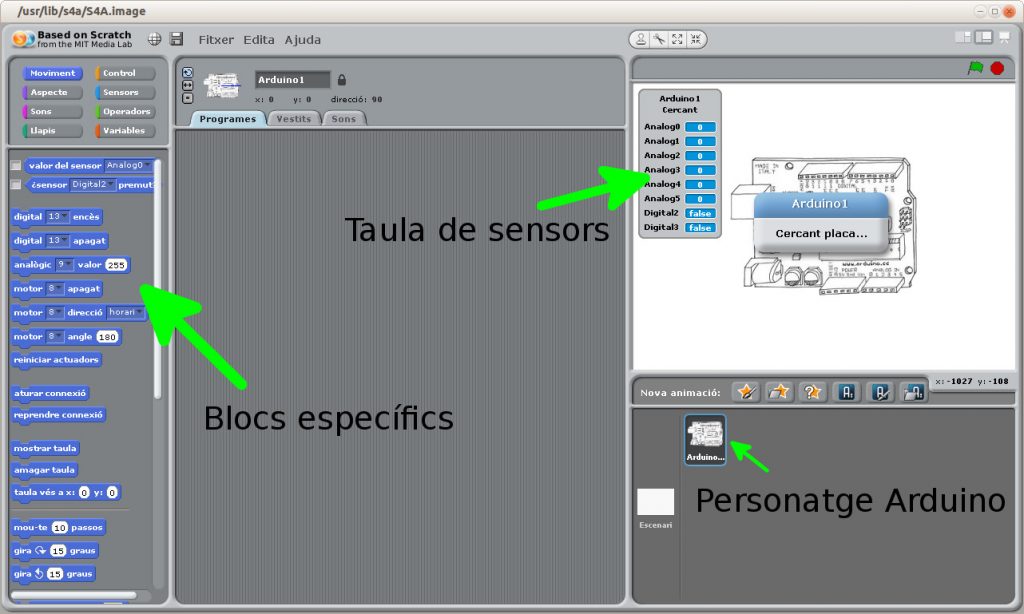
- A l’escenari de S4A veureu un personatge Arduino i una taula de sensors on es mostren el valors numèrics que mesuren els sensors connectats a la placa.
Amagueu el personatge Arduino, si voleu, per disposar de l’escenari, però no l’esborreu perquè és necessari per a la comunicació amb la placa. La taula de sensors també la podeu amagar si convé.
Els sensors
Els sensors informen a la placa sobre el seu entorn. Per exemple, el sensor de llum dóna un valor numèric en funció de la llum que rep.
El valor mesurat per un sensor es mostra a la taula de sensors. Podeu fer visible o amagar la taula de sensors i situar-la a l’escenari amb aquests blocs de S4A :
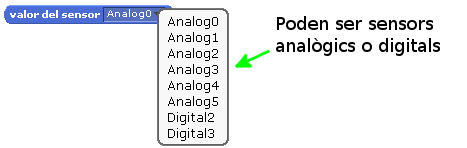
 Hi ha sensors :
Hi ha sensors :
- Analògics : Donen un valor numèric en els pins analògics d’entrada entre 0 i 1023
- Digitals : Donen un valor numèric en els pins digitals d’entrada de 1 o 0 (true o false)
Amb aquest bloc podeu saber el valor mesurat per un sensor amb S4A :
![]() Si marqueu la casella gris fareu visible el valor mesurat a l’escenari
Si marqueu la casella gris fareu visible el valor mesurat a l’escenari
Sensors del kit de robòtica
- 2 sensors de llum.

- 1 sensor d’ultrasons. Incorpora un emissor i un receptor d’ultrasons (sons de freqüència superior a la màxima audible per la nostra orella). Es pot fer servir per detectar la presència d’un objecte (entre 0 i 500 cm).
- 2 sensors d’infraroig (IR). Són sensibles al senyal infraroig que emeten els comandaments a distància. Es pot ajustar la sensibilitat girant el cargolet blau del sensor.
Els components d’entrada i control : polsador i potenciòmetre.
S’accionen manualment per donar instruccions a la placa. és a dir, els podem fer girar amb la mà o prémer per activar la funció que haguem programat.
Components d’entrada i control del kit de robòtica
- 1 polsador. Té la forma d’un botó. Com que el polsador només pot tenir 2 estats, premut (1) o no premut (0), hem de connectar-lo a un pin digital d’entrada .

Podeu saber si un polsador està premut amb S4A amb aquest bloc :
![]()
![]()
- 1 potenciòmetre. És un comandament que podeu fer girar amb la mà. Com que permet obtenir un valor entre 0 i 1023, cal connectar-lo a un pin analògic d’entrada.

Els components de sortida : LEDs, brunzidors i motors
Poden ser llums (per exemple, LEDs), acústics (per exemple, un brunzidor) o actuadors (per exemple, motors).
Components de sortida del kit de robòtica
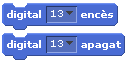
- 2 LEDs. Emeten llum. En teniu un de llum verda i un de llum blava. Com que un LED només té 2 estats diferents, encès (1) o apagat (0), hem de connectar-lo a un pin digital de sortida.

Podeu encendre o apagar un LED amb S4A amb aquests blocs :
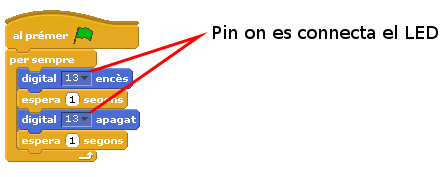
Us deixem aquest exemple, on un LED connectat al pin 13 s’encén i s’apaga de forma intermitent en prémer la bandera verda :
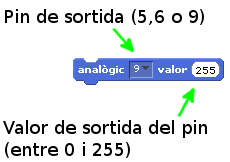
- 1 brunzidor. Emet un so. Com que pot sonar a diferents volums entre 0 (silenci) i 255 (volum màxim), hem de connectar-lo a un pin analògic de sortida.

Amb aquest bloc de S4A podeu fer sonar el brunzidor. Com més gran poseu el valor de sortida, més soroll farà el brunzidor :
Els motors
Els motors són components que incorporen un eix que gira quan rep corrent elèctric. N’hi ha de molts tipus diferents, aquí fareu servir servomotors. Els podeu connectar als pins 4,7 o 8, que són els que indica S4A.
Motors del kit de robòtica
- 2 motors miniservo. Podeu fixar un dels accessoris blancs a l’eix del motor i fer que apunti en una direcció i sentit concrets, amb un angle entre 0º i 180º.

- 2 servomotors de rotació (gir) contínua (360º). Podeu fixar un dels accessoris de color negre a l’eix del motor i fer girar el motor en sentit horari o antihorari.
 A l’escen
A l’escen
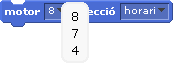
Aquests són els blocs específics de S4A per a motors :
- Podeu fer girar el servomotor de rotació contínua i fixar la direcció on apunta el miniservo. Feu servir els pins 4,7 o 8, que són els que indica S4A.

- La direcció de rotació del servomotor de rotació contínua pot ser horària o antihorària :
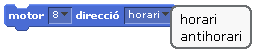
![]()

Obriu un nou projecte amb el nom de m6repte21. Podeu visualitzar a la taula de sensors què mesura un sensor de llum connectat a la placa? .
![]() Pista: Connecteu un sensor de llum a un pin d’entrada analògic.
Pista: Connecteu un sensor de llum a un pin d’entrada analògic.
![]()

Obriu un nou projecte amb el nom de m6repte22. Feu un programa que permeti encendre i apagar un LED.
![]() Pista: Connecteu un LED a un pin de sortida digital i feu servir els blocs digital encès i digital apagat.
Pista: Connecteu un LED a un pin de sortida digital i feu servir els blocs digital encès i digital apagat.
![]()

Obriu un nou projecte amb el nom de m6repte23 . Feu un programa que faci girar un servomotor de rotació contínua en sentit antihorari.
![]() Pista: Connecteu un servomotor a un pin per controlar motors de rotació contínua i feu servir el bloc motor direcció antihorària
Pista: Connecteu un servomotor a un pin per controlar motors de rotació contínua i feu servir el bloc motor direcció antihorària
![]() El nostre projecte creix…
El nostre projecte creix…
En aquesta sessió heu conegut la placa del kit de robòtica (que serà el cervell del vostre robot) i com es pot programar amb una versió modificada de Scratch anomenada Scratch for Arduino (S4A). Heu vist quins components es poden connectar a la placa i en els reptes heu practicat amb ells. Ara ja esteu preparats per començar a construir la caixa forta i pensar quins components incorporareu al vostre robot.
Recordeu que heu d’anar completant el document de text acordat amb el vostre mestre al final de cada sessió.
![]() Com que som programadors i programadores parlem de…
Com que som programadors i programadores parlem de…
- Placa: és un conjunt de dispositius electrònics soldats a una base
- Programa: és el conjunt de blocs de diferents categories que es van encaixant per dur a terme una acció completa.
- Estructura seqüencial: són parts d’un programa on les instruccions es van executant una darrera de l’altra.
- Component: Cadascun dels dispositius electrònics del kit de robòtica (LEDs, sensors …)
- Pins de connexió: punts on connectar els components
- Magnitud: una propietat natural que s’expressa en forma de nombre (valor numèric). Aquests nombres s’expressen en unitats. Per exemple, la unitat de tensió és el Volt (V).
- Digital: magnitud que només pot tenir 2 valors. Per exemple, en la caixa forta el valor 0 seria caixa tancada i el valor 1 seria caixa oberta.
- Analògica: magnitud que pot tenir infinits valors entre 2 valors extrems. Per exemple, el sensor de llum mesura valors entre 0 i 255.
- Motor: component amb un eix que gira quan rep corrent elèctric.